 – مقدماتی")


")








معماری ارتباطات و پروتکل های مسیریابی در شبکه FANET
در این بخش مقاله مروری بر معماری ارتباطات و پروتکل های مسیریابی در شبکه ادهاک پروازی (FANET) را با عنوان انگلیسی Flying Ad-Hoc Networks (FANETs): A Review of Communication architectures, and Routing protocols برای دانلود رایگان قرار داده ایم که در قالب 9 صفحه به زبان انگلیسی ارائه شده است. ادامه به چیکده این مقاله شبکه FANET پرداخته و فهرست مطالب مقاله به همراه لینک دانلود رایگان آن قرار داده شده است. همچنین تصاویر مفهومی از محتوای مقاله قابل مشاهده است.
چکیده مقاله
با پیشرفت تکنولوژیکی اخیر در زمینه الکترونیک، حسگرها و سیستم های ارتباطی، تولید پهپادهای کوچک (وسایل نقلیه هوایی بدون سرنشین یا UAV) امکان پذیر شد که می تواند در کاربرد های مختلف همچون نظامی، غیر نظامی، کشاورزی و تجاری به صورت وسیع مورد استفاده قرار گیرد. با این حال، قابلیت ها و توانایی های یک پهپاد کوچک به صورت انفرادی کافی نیست و در برخی شرایط پاسخگوی نیازهای مختلف نمی باشد. پهپادهای چندگانه یا پهپادهای گروهی (Multiple-UAVs) می توانند سیستمی را با همکاری یکدیگر ایجاد کنند که فراتر از محدودیت های یک پهپاد کوچک می باشد.

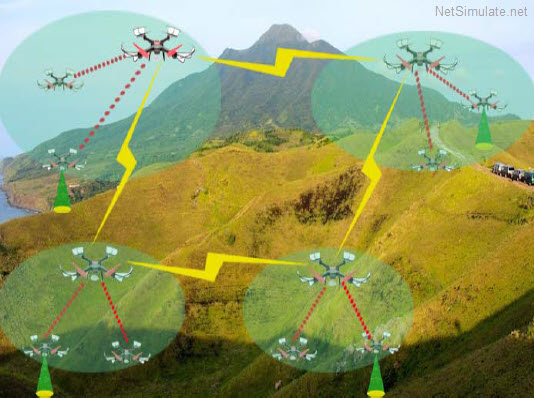
شبکه های ادهاک پروازی فنت (Flying Ad hoc Networks – FANETs) نوعی شبکه است که از گروهی از پهپادهای کوچک متصل به هم به روش ad-hoc تشکیل شده که برای دستیابی به اهداف سطح بالا در یک تیم ادغام می شوند. تحرک، عدم نیاز کنترل مرکزی، خود ساماندهی و ماهیت موقتی در بین پهپادها از ویژگی های اصلی FANET ها هستند که می توانند اتصال را گسترش داده و دامنه ارتباطات را در منطقه کم زیرساخت گسترش دهند. همچنین در صورت بروز شرایط فاجعه آمیز و در صورت عدم وجود زیرساخت های ارتباطی عادی، می توان از شبکه های ادهاک پروازی (FANET) برای تهیه یک شبکه با هزینه های عملیاتی پایین و با سرعت قابل استقرار بالا، انعطاف پذیر، خود تنظیم و نسبتا کوچک استفاده کرد.
از طرف دیگر اتصال چندین پهپاد در شبکه ادهاک (ad-hoc) یک چالش بزرگ است. این سطح از هماهنگی نیاز به یک معماری ارتباطی مناسب و پروتکل های مسیریابی دارد که می تواند بر روی گره های پروازی بسیار پویا تنظیم شود تا بتواند ارتباطی مطمئن و قوی برقرار کند. هدف اصلی این مقاله، معرفی معماری ارتباطی مناسب در شبکه FANET و بررسی اجمالی پروتکل های مسیریابی برای شبکه FANET می باشد. همچنین موضوعات دیگر تحقیقات در مورد پروتکل های مسیریابی موجود نیز در این مقاله مورد بررسی قرار گرفته است.

فهرست مطالب مقاله
- چکیده
- مقدمه
- معماری ارتباطات
- پهپادها در شبکه ادهاک (UAV Ad Hoc Network)
- پهپهادهای گروهی در شبکه ادهاک (Multi-Group UAV Ad hoc Network)
- شبکه ادهاک چند لایه برای پهپادها (Multi-Layer UAV Ad Hoc Network)
- پروتکل های مسیریابی (Routing Protocols)
- پروتکل های مسیریابی استاتیک (Static Routing Protocols)
- پروتکل مسیریابی LCAD یا Load Carry and Deliver Routing
- پروتکل مسیریابی سلسله مراتبی چند سطحی (Multilevel Hierarchical Routing – MLH)
- پروتکل مسیریابی داده محور (Data Centric Routing – DCR)
- پروتکل های مسیریابی فعال (Proactive Routing Protocols)
- پروتکل مسیریابی DSDV یا Destination- Sequenced Distance Vector (DSDV)
- پروتکل پروتکل مسیریابی OLSR یا Optimized Link State Routing (OLSR)
- پروتکل های مسیریابی واکنش پذیر (Reactive Routing Protocols)
- پروتکل مسیریابی منبع پویا (Dynamic Source Routing – DSR)
- پروتکل مسیریابی بردار فاصله بر اساس تقاضا (Ad Hoc On-Demand Distance Vector – AODV)
- Time-slotted on-demand Routing
- پروتکل های مسیریابی ترکیبی (Hybrid Routing Protocols)
- پروتکل مسیریابی منطقه یا میدانی (Zone Routing Protocol – ZRP)
- پروتکل مسیریابی TORA یا Temporarily Ordered Routing Algorithm
- پروتکل های مسیریابی مبتنی بر موقعیت جغرافیایی / موقعیت (Geographic/ Position Based Routing Protocols)
- پروتکل مسیریابی بدون تابعیت محیطی حریصانه (Greedy Perimeter Stateless Routing – GPSR)
- پروتکل مسیریابی GPMOR یا Geographic Position Mobility Oriented Routing
- پروتکل مسیریابی سلسله مراتبی (Hierarchical Routing Protocols)
- الگوریتم خوشه بندی پیش بینی تحرک (Mobility Prediction Clustering Algorithm – MPCA)
- الگوریتم خوشه بندی شبکه UAV یا Clustering Algorithm of UAV networking
- بررسی تحقیقات آزاد
- نتیجه گیری
- منابع
تصاویری از خروجی








")


")



")

")
 – مروری جامع بر شبکه 5G")


 با NS2")

 در نرم افزار متلب")








")





")

هیچ نظری ثبت نشده است